3D机器视觉是机器人领域令人激动人心的技术进步之一。许多公司正在转向3D视觉,因为它比传统的2D具有许多优势,包括更高的准确性、速度和灵活性。在这篇博文中,我们将讨论3D视觉是如何工作的,以及为什么您应该考虑在您的应用中使用它。
二维视图
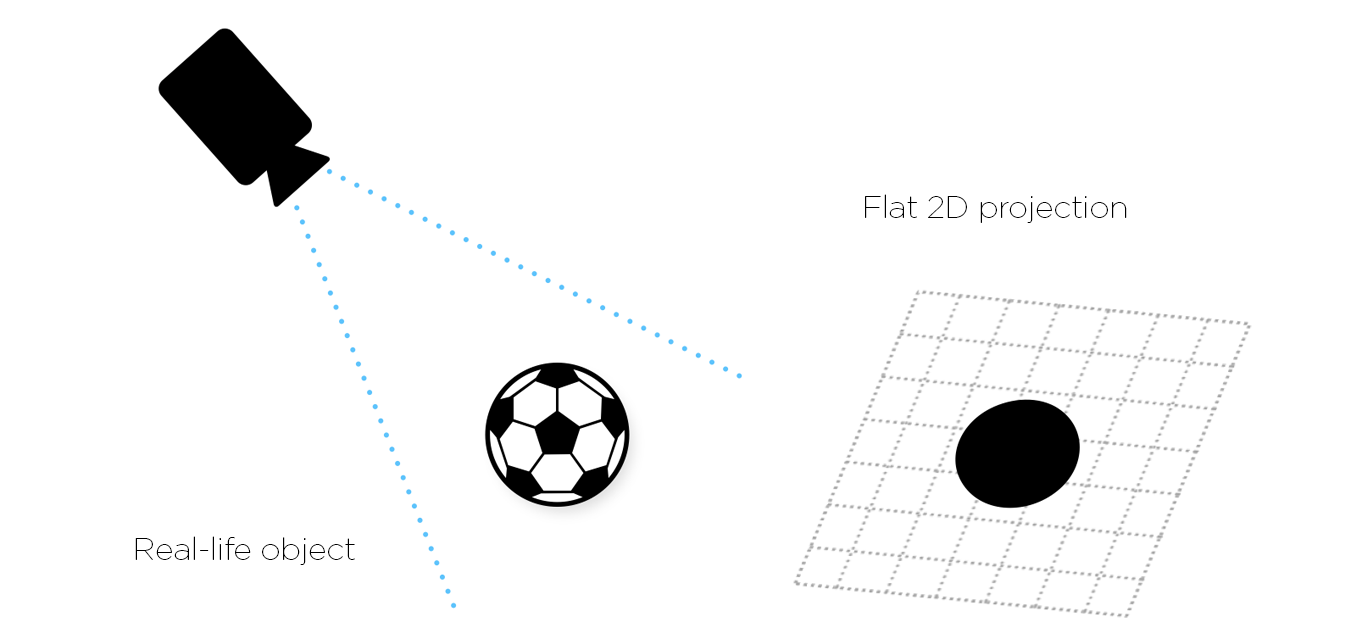
事实上,2D机器视觉系统已经部署了几十年,证明了它们的价值。2D机器视觉对于许多应用来说是一个很好的工具,但是它有一些基本的问题。
2D相机只能看到平面图像中的世界。这意味着你不能按照物体的实际情况来检查它们,或者按照你期望的那样来测量它们。这也意味着您的检测软件需要应用复杂的算法和试探法来尝试和猜测一个物体从单一图像看起来是什么样子。这些假设通常会失败,并导致您的应用程序出错。
由于目标对象图像是由从其反射的光形成的,因此由于环境条件或人工照明的变化而导致的视场中的照明变化会对精度产生不利影响。工厂环境中的光线太强、太弱或阴影会对2D平面中出现的边缘和特征的清晰度产生不利影响。
对比度的缺乏给2D机器视觉带来了一个问题,因为正是物体表面的清晰对比度(以及边缘)决定了相机能够多好地分辨出物体。例如,暗的或亮的表面不会清晰地显示出来,因此它们会缺少细节。缺乏对比是一个问题。
由于我们没有用2D机器视觉处理任何高度信息,目标物体在Z平面上的移动所导致的误差带来了进一步的限制。如果物体总是放在一个完全平坦的表面上,与图像传感器保持精确的焦距,那么它就不会成为成像精度的问题。
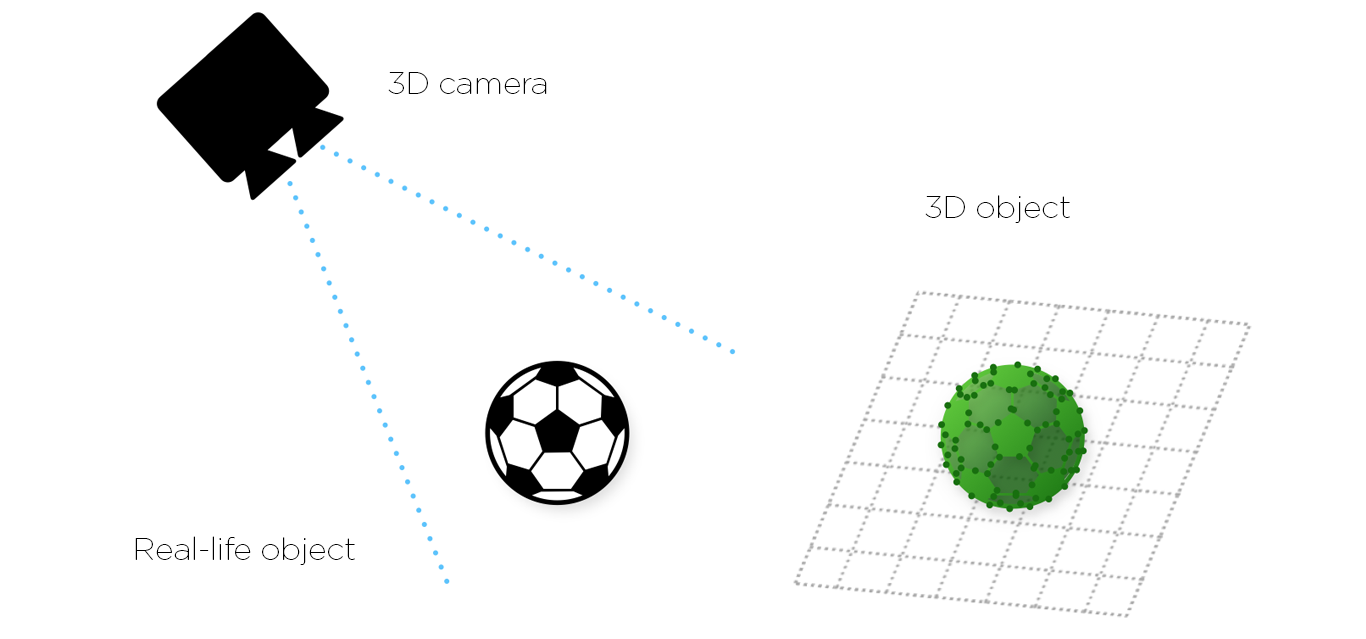
三维之美
这是关于3D的重要一点。由于能够可靠地捕捉额外的三维数据,3D机器视觉系统不受对2D系统产生不利影响的环境因素的影响——之前讨论的照明、对比度和到物体的距离不再是问题。
是的,与二维图像处理相比,3D工作确实需要更多的时间、处理器和软件,但是多核处理器、3D算法和软件工具的快速发展意味着3D机器视觉系统现在完全能够满足生产线的生产能力要求。
作为这种扩展能力的结果,3D机器视觉正被应用于范围广泛的任务2D能力不足的地方,包括:
随意箱柜拣选尤其是,仍然被许多人视为机器视觉系统的真正严峻考验,不难理解为什么。机器人需要选择一个部分,并想出如何更好地抓住它。但是它也需要考虑自身之间的尺寸差异以及各种测量。要做到这一点,机器人需要非常清楚地看到零件!
如果它们是暗的或吸光的、有光泽的、反光的,它需要处理不断变化的场景动态;反射、缺失数据和固有噪声。这个过程必须快速准确地进行,一次又一次。
这就是3D机器视觉发挥作用的地方。这是能够实时、高精度处理所有这些信息的唯一方法,无论物品在箱子中的位置或方向如何。