
2D 和 3D 视觉系统在各行各业都至关重要,尤其是在制造业、机器人技术和自动化领域。根据它们捕获和分析的尺寸数据,它们可以实现不同的用途。让我们来详细了解一下这两个系统的工作原理。
底层技术:机器视觉智能引擎
机器如何“看”?更重要的是,它们如何理解所见?与人类一样,计算机视觉首先需要利用复杂的传感器(充当“眼睛”)捕捉场景,然后借助复杂的算法和机器学习机制(替代大脑)识别场景。
机器视觉系统通过多阶段流程对视觉数据进行细致分析,从而实现其功能。此过程始于获取原始视觉输入,例如图像或视频。接下来,系统处理这些输入,为深入分析做好准备。
下一阶段涉及特征提取,系统识别数据中的关键元素和模式,如边缘、形状和纹理。
最后,系统解读这些提取的特征,从视觉信息中得出结论并生成可行的洞察。这种复杂的流程使计算机视觉系统能够将原始视觉输入转化为有意义且可用的数据,从而实现广泛的应用。
实际情况如下:
图像识别:计算机视觉的这一基础技术使系统能够准确地检测和分类图像中的对象。它利用模式识别和特征提取等技术,识别形状、颜色和纹理,使计算机能够解释或得出结论。
机器学习算法:这些算法使计算机视觉系统能够在训练阶段通过从数据中学习来提高其性能。它们通过监督学习分析历史数据以提高物体检测的准确性,并使用无监督学习识别未标记数据中的模式。
神经网络:受人脑启发,神经网络通过多层级处理信息,支持模式识别和决策。卷积神经网络 (CNN) 尤为重要,它擅长分析像素数据以检测模式并解读图像和视频。

2D视觉系统的机制
2D 视觉系统采集二维图像,具体来说,是沿 X(宽度)轴和 Y(高度)轴采集图像。它们生成的平面图像仅代表物体轮廓,不包含深度信息。这种简易性使其非常适合条形码读取、表面质量控制以及深度感知并非至关重要的基本检查等任务。
成分
2D视觉系统的主要组件包括:
传感器:通常 CCD 或 CMOS 传感器捕获图像。
光学:将光聚焦到传感器上的镜头。
相机:根据传感器捕获的原始数据处理图像。
通信接口:促进系统之间的交互。例如,传感器、摄像头、软件。
照明:控制照明对于增强对比度和减少阴影至关重要。
图像处理软件:分析捕获的图像以提取相关数据。
2D视觉系统是一项先进的技术,使机器能够“看见”并解读其周围环境。它由多个协同工作的关键组件组成。
该系统的核心是摄像头,通常采用CCD或CMOS传感器,用于捕捉场景图像。镜头等光学元件将这些图像聚焦到传感器表面。照明对于控制照明度和减少阴影至关重要,有助于提升图像质量。
图像采集后,会由图像处理软件进行处理。该软件会运用算法分析图像,提取相关特征,并根据收集到的信息做出决策。例如,它可以识别物体、测量尺寸或检测缺陷。
最后,通信接口允许视觉系统与其他系统(例如机械臂或控制系统)进行交互。这使得它能够无缝集成到自动化流程中。
通过结合这些组件,2D 视觉系统使机器能够执行曾经属于人类视觉专属领域的任务。
2D视觉系统的局限性
虽然 2D 系统通常比 3D 系统更具成本效益且速度更快,但它们具有明显的局限性:
对光线的敏感度:环境光的变化会对图像清晰度产生不利影响。
缺乏深度信息:它们无法测量高度或体积,因此不适合复杂的几何形状。
环境敏感度: 2D 视觉系统在具有一致照明条件的受控环境中表现最佳。
在二维机器视觉中,图像的形成依赖于目标物体反射的光线。视野范围内的环境光或人工照明的变化会显著影响精度。光线过强或过弱,以及工厂环境中的阴影,都会降低二维图像中边缘和特征的清晰度,从而降低检测质量。因此,对光照条件的敏感性成为这些系统面临的关键挑战。
由于二维机器视觉系统依赖清晰的对比度来检测边缘和特征,因此它们难以识别非常暗或高反射性的物体。这些表面通常缺乏足够的对比度,即使采用多种照明技术,相机也无法有效区分细节。因此,低对比度表面对二维视觉技术的发展构成了持续的障碍。
此外,由于二维机器视觉仅捕获 X 和 Y 平面数据,因此缺乏深度信息,这意味着它无法适应 Z 轴上的变化。如果目标物体始终位于完全平坦的表面上,并且与传感器的焦距精确,则成像精度不会受到影响。然而,由于系统无法记录深度,Z 平面上的任何移动都会引入误差。
根据定义,二维机器视觉无法处理复杂的三维形状或形态。对于需要在 X 和 Y 平面之外进行精确测量的复杂零件或组件,二维视觉显得力不从心。它无法分析体积、评估三维几何形状或执行精确的拾取和放置任务,因为它缺乏识别物体形状并与之交互所需的深度感知能力。

3D视觉系统的机制
与 2D 视觉不同,3D 视觉系统通过沿 X、Y 和 Z(深度)三个轴捕获数据,超越了 2D 系统的功能。这使得它们能够创建物体形状和体积的详细表示,并以点云的形式呈现。
3D机器视觉系统赋予您的机器卓越的深度感知能力,使其能够像人类一样在三维空间中理解周围环境。这一过程始于专门的摄像头和传感器,它们充当机器的眼睛,从各个角度捕捉多幅图像,构建出完整的场景视图。精准的照明起着至关重要的作用,确保每幅图像清晰锐利,无阴影或模糊,从而使系统能够准确地解读视觉信息。
3D机器视觉的真正威力在于其先进的软件。该软件充当系统的大脑,智能地将摄像头和传感器捕捉到的多幅图像拼接在一起,从而创建环境的详细3D模型。该模型不仅仅是视觉呈现,它还能为机器提供视野范围内物体的尺寸、形状和位置的精确信息。
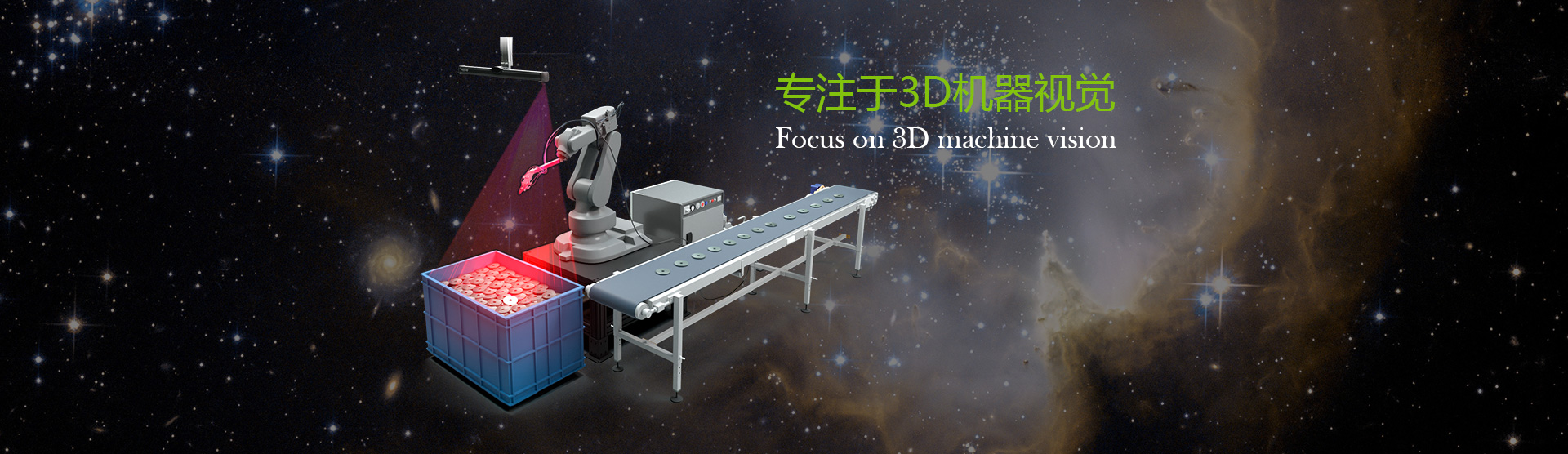
想象一下,一个机械臂的任务是从一堆随机摆放的零件中拾取特定的零件。配备 3D 视觉的机器人可以精准地确定零件的位置、方向,即使零件倒置也能准确定位。这使得机器人能够调整自身动作,每次都能精准地抓取零件,从而显著提高生产速度并减少错误。
3D视觉技术
3D视觉系统采用了几种扫描技术:
激光三角测量:该技术使用激光束根据反射角度测量距离。
立体视觉:通过使用两个摄像头从略微不同的角度捕捉图像来模仿人类的双眼视觉。
飞行时间 (ToF):测量光脉冲传播到物体并返回所需的时间。
结构光:将已知图案投射到物体上,并分析图案的变形以确定深度。

了解有关3D 视觉技术和实践的更多信息。
关键组件
关键组件包括:
3D 摄像机/传感器:使用各种技术(例如激光雷达或结构光传感器)捕获空间数据。
先进的处理软件:利用复杂的算法来解释深度数据并生成 3D 模型。
照明技术:这可能涉及投射图案,以提高即使在具有挑战性的表面上测量的准确性。

优势与局限性
3D视觉系统具有许多优势:
深度感知:对于需要精确测量复杂形状的应用至关重要。
物体处理的多功能性:更适合物体高度变化或表面反射或对比度低的动态环境。
然而,3D视觉系统也面临诸多挑战,例如由于额外的硬件和处理要求而导致的复杂性和成本增加。此外,它们还需要更多的计算资源来分析收集到的额外数据。
Copyright © 信捷动力科技(上海)有限公司 网站备案号:沪ICP备18044823号-1 沪公网安备 31011002000656号
联系人:(上海): 范先生 Tel: 138 1871 5501(微信同号) 地址:上海市杨浦区营口路588号海尚杰座1510室
(长沙): 黄先生 Tel: 187 7488 4796(微信同号)
地址:湖南长沙市长沙县开元东路95号华润置地广场二期15栋2106-2107室(地铁3号线星沙文体中心站4号口150米)

